Kopernikus
But how will these robots behave and upon what basis will they make decisions? This leads to the question: How do we design behavioural interfaces?
The answers to these questions can only be gained from practical experience. As a transdisciplinary team that is equipped with a wide range of expertise, we were faced with this challenge ourselves and started to develop tools that we could use to explore the vision of behavioural interfaces for next-generation products.
This is Kopernikus
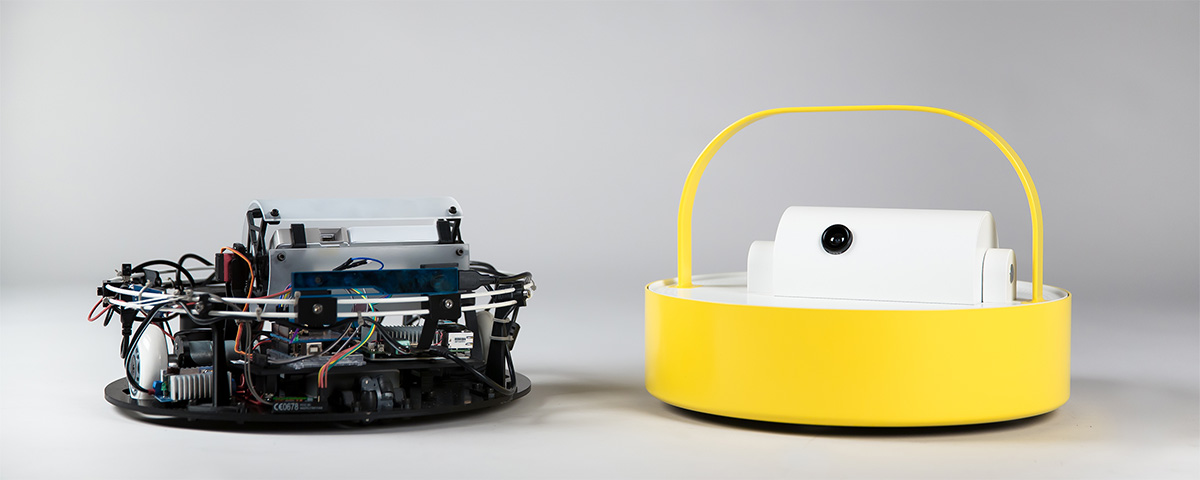
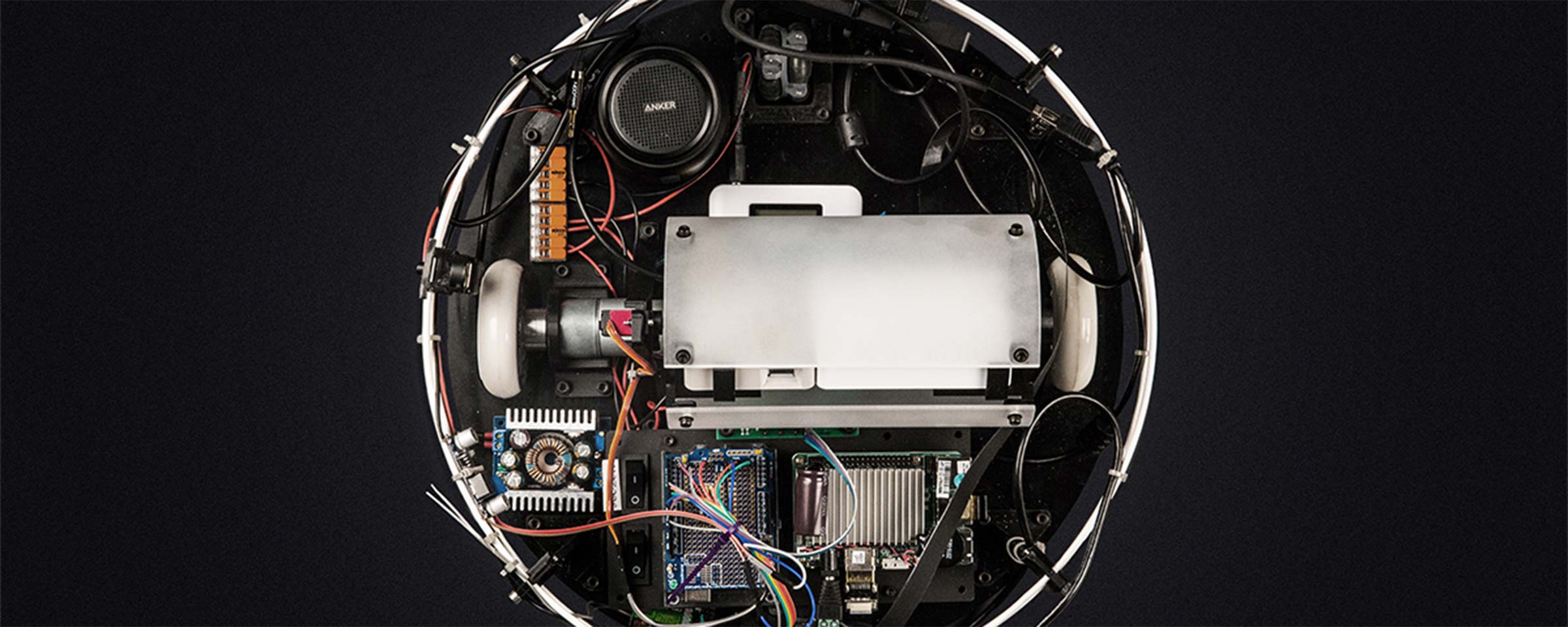
The result is Kopernikus – an experimental prototyping structure which enables us to form hypotheses and make them tangible in a quick and easy manner. Kopernikus is built of low-priced electronic components that can easily be found online. All the structural parts can be either 3d printed or machined with accessible tools and can be modified easily. We have published the list of components, the design and the elementary software modules in the form of an open-source project.
Kopernikus is equipped with a stereo camera and three microphones so that it has a visual and audio grasp of its surroundings. It also has a pivotable laser projector and a speaker and is thus able to communicate with the outside world using audio signals and image projections. Using these basic properties, we are investigating how robots can act and communicate in a way that is agreeable to us humans.
Designing behavioural interfaces
With the use of neural networks, the developer can no longer directly influence how the robot behaves. On the contrary, it is faced with the real world, processes the perceived inputs and makes decisions subsequently. A frequent example is robot navigation in living spaces. How does the robot orient itself? Which path does it choose in order to get from A to B and how does it deal with changes to the environment, for example if a human crosses its path? Conventional algorithms are quickly overwhelmed when it comes to making decisions in complex situations. But this is where the decisive aspects come into play: We want robots to handle complex problems in an elegant manner and solve them in a way that makes sense to us. For us, one of the most exciting fields is heuristic problem solving, a system which uses concepts from cognitive science to model a human-like decision-making process. The two-tier system consists of many small ‘agents’, which constantly make suggestions about which movement the robot should make next, while the other half is constantly evaluating them with regard to the sensory data generated from the surroundings. By varying the weighting of the evaluators, it is possible to influence the decisions that the system makes and ultimately the perceived personality of the robot.



Between research and design
At Intuity, prototyping is one of the most important tools for approaching complex problems. Prototyping makes ideas concrete. The resulting artifacts form an important basis for discussions, which not only accelerates the learning process, but often makes it possible in the first place. It is of fundamental importance that technologies are made accessible to a wide audience so that the creative potential can be exploited. It must be possible to play and experiment with technologies. Errors have to be permissible. This is the only way to produce tools which can solve the problems of our age.
This project was funded by the German Federal Ministry of Education and Research.
Kopernikus is a winner of the UX Design Awards 2018 in the category “Concept”